|
Public Member Functions |
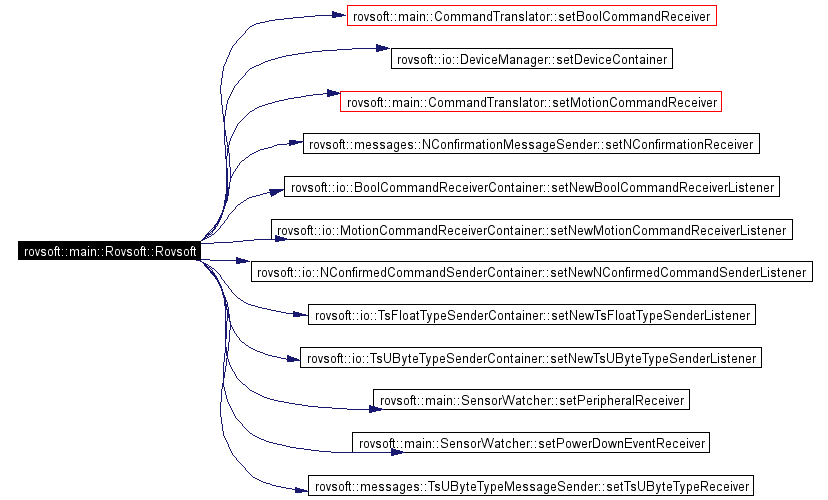
| | Rovsoft (const char *robotInt, const char *picInt, const char *server_address, unsigned short port) |
| | The constructor for creating a rovsoft object.
|
| virtual void | newNConfirmedCommandSender (messages::NConfirmedCommandMessageSenderInterface &sender) |
| | Should be invoked when a new NConfirmedCommandSender device was created.
|
| virtual void | newTsUByteTypeSender (messages::TsUByteTypeMessageSenderInterface &sender) |
| | Sets the TsUByteTypeReceiverContainer as message receiver.
|
| virtual void | newTsFloatTypeSender (messages::TsFloatTypeMessageSenderInterface &sender) |
| | Should be invoked when a new TsFloatTypeSender device was created.
|
| void | run () |
| | This method sends init messages through the interfaces in a periodic intervall.
|
Protected Member Functions |
| io::SegmentIOStreamer * | getRobotStream () |
| io::SegmentIOStreamer * | getPICStream () |
| io::IOStreamer * | getServerStream () |
| io::SegmentIOStreamer * | getRS232Stream (std::string &filename, unsigned long baudrate, ost::Serial::Flow control, ost::Serial::Parity parity, int data_bits, int stop_bits, const char *prefix_preamble, unsigned char len_pos, bool is_PIC=false) |
| | Returns a SegmentIOStreamer initialized with a BinaryLenSegmentIOStreamer using a Serial stream.
|
| io::IOStreamer * | getTCPClientStream (std::string &address, unsigned short port) |
| | Get a new IOStreamer connected to a TCPStream, (defined in common c++).
|
Protected Attributes |
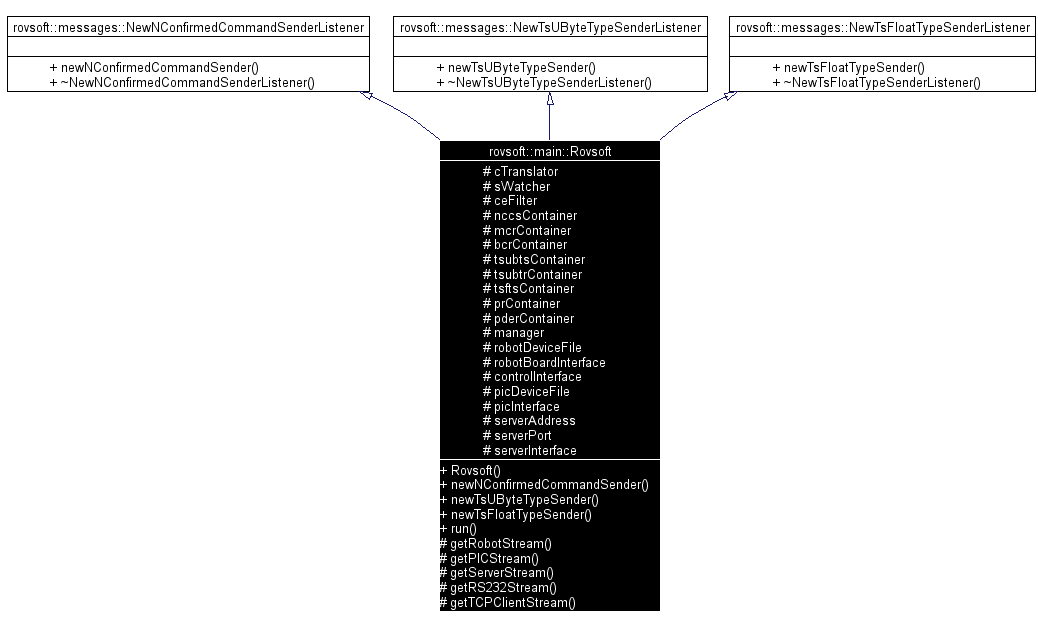
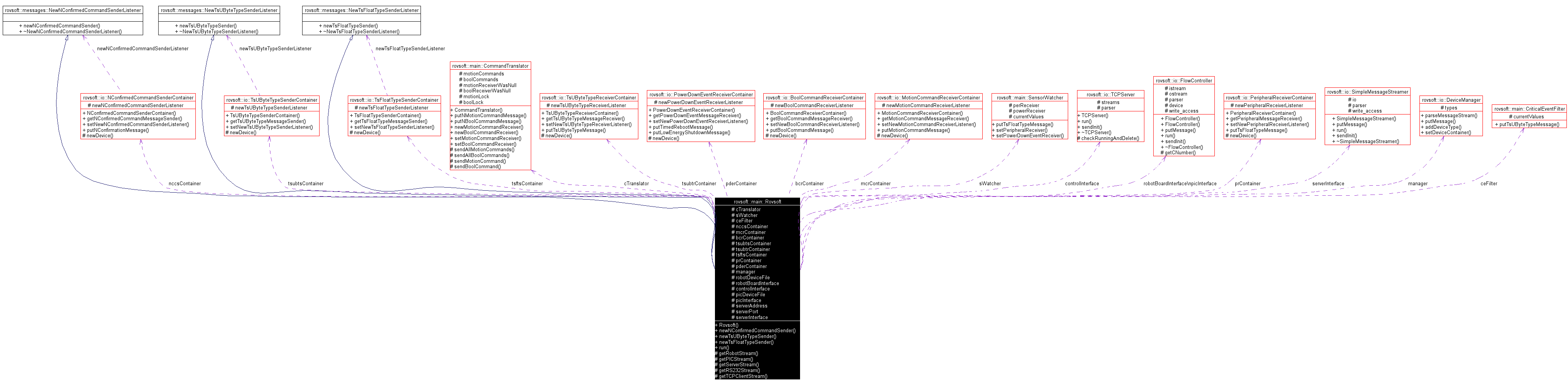
| CommandTranslator | cTranslator |
| SensorWatcher | sWatcher |
| CriticalEventFilter | ceFilter |
| io::NConfirmedCommandSenderContainer | nccsContainer |
| io::MotionCommandReceiverContainer | mcrContainer |
| io::BoolCommandReceiverContainer | bcrContainer |
| io::TsUByteTypeSenderContainer | tsubtsContainer |
| io::TsUByteTypeReceiverContainer | tsubtrContainer |
| io::TsFloatTypeSenderContainer | tsftsContainer |
| io::PeripheralReceiverContainer | prContainer |
| io::PowerDownEventReceiverContainer | pderContainer |
| io::DeviceManager | manager |
| | The device manager.
|
| std::string | robotDeviceFile |
| | The interface for the communication with the robot board.
|
| io::FlowController | robotBoardInterface |
| io::TCPServer | controlInterface |
| std::string | picDeviceFile |
| io::FlowController | picInterface |
| | The interface for the communication with the energy management PIC.
|
| std::string | serverAddress |
| unsigned short | serverPort |
| io::SimpleMessageStreamer | serverInterface |
| | The interface for the communication with the server.
|







 1.4.3
1.4.3