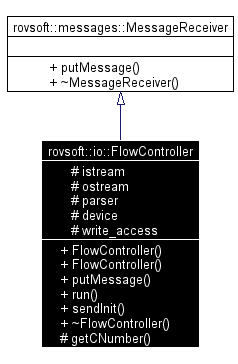
#include <FlowController.hh>
Inheritance diagram for rovsoft::io::FlowController:
Public Member Functions | |
| FlowController (SegmentIOStreamer *stream, MessageStreamParser &reader) | |
| FlowController (SegmentIStreamer *istr, SegmentOStreamer *ostr, MessageStreamParser &reader) | |
| Use seperate IStreamer and OStreamer. | |
| virtual void | putMessage (const messages::MessagePtr message) throw (TargetUnreachableExceptionPtr) |
| This method is used by devices for writing messages to the underlying stream, it should not return until a positive confirmation message was received (if the message being send needs a confirmation). | |
| virtual void | run () |
| this function runs as tread | |
| void | sendInit () |
| virtual | ~FlowController () |
| Delets streams. | |
Protected Member Functions | |
| bool | getCNumber (const messages::MessagePtr message) |
Protected Attributes | |
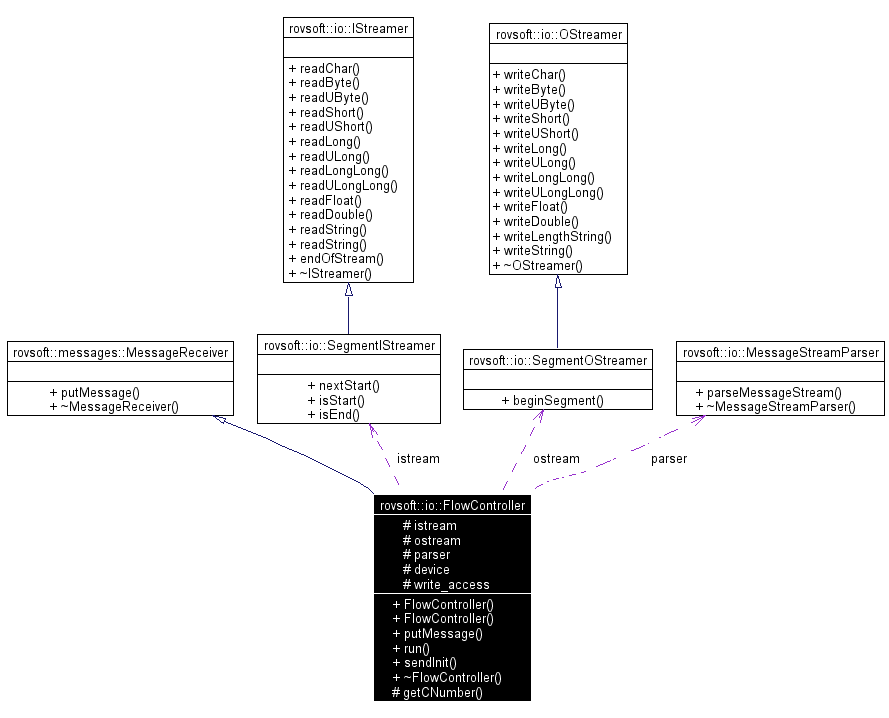
| SegmentIStreamer * | istream |
| SegmentOStreamer * | ostream |
| MessageStreamParser & | parser |
| std::map< unsigned short, states > | device |
| the map contains the DA of the devices and a struct for the possible states of the devices | |
| ost::Semaphore | write_access |
Classes | |
| struct | states |
| this structure contains the state of the device More... | |
(like in the EnergyCommunication or the Robotboardcommunication.)
If the parser reads the message and afterwards the end is not reached, the parser should have the option to check if the end was reached, after reading.
|
||||||||||||
|
Here is the call graph for this function:  |
|
||||||||||||||||
|
Use seperate IStreamer and OStreamer.
Here is the call graph for this function:  |
|
|
Delets streams.
|
|
|
|
|
|
This method is used by devices for writing messages to the underlying stream, it should not return until a positive confirmation message was received (if the message being send needs a confirmation).
Implements rovsoft::messages::MessageReceiver. Here is the call graph for this function:  |
|
|
this function runs as tread
Here is the call graph for this function: 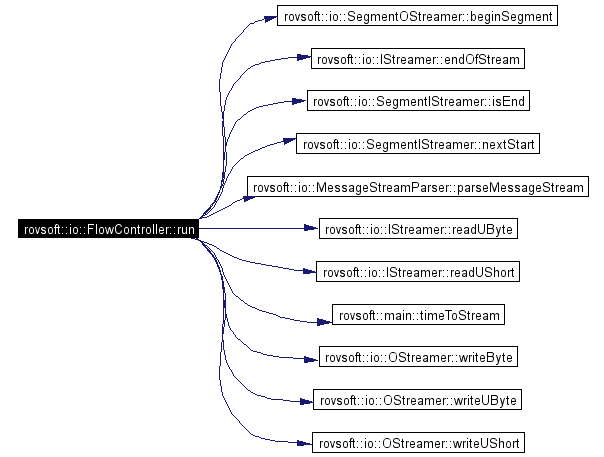 |
|
|
Here is the call graph for this function: 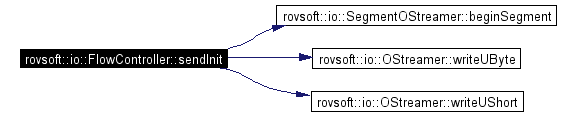 |
|
|
the map contains the DA of the devices and a struct for the possible states of the devices
|
|
|
|
|
|
|
|
|
|
|
|
|
 1.4.3
1.4.3